exn_beam2g_b¶
- Purpose:
Buckling analysis of a plane frame.
- Description:
Buckling safety of the frame analysed in
exn_beam2gis performed. The same computational model as inexn_beam2gis used. First, the same computation as inexn_beam2gis performed. In this computation the linear stiffness matrix is obtained by saving the stiffness matrix established using the functionassemin the first iteration.- Example:
The computation follows the same procedure as in
exn_beam2g, with the addition of topology, element properties, and coordinates definition:import numpy as np import calfem.core as cfc import calfem.vis_mpl as cfv edof = np.array([[4, 5, 6, 1, 2, 3], [7, 8, 9, 10, 11, 12], [4, 5, 6, 7, 8, 9]]) E = 200e9 A1 = 2e-3 A2 = 6e-3 I1 = 1.6e-5 I2 = 5.4e-5 ep1 = np.array([E, A1, I1]) ep3 = np.array([E, A2, I2]) ex1 = np.array([0.0, 0.0]) ey1 = np.array([4.0, 0.0]) ex2 = np.array([6.0, 6.0]) ey2 = np.array([4.0, 0.0]) ex3 = np.array([0.0, 6.0]) ey3 = np.array([4.0, 4.0]) eq1 = np.array([0.0]) eq2 = np.array([0.0]) eq3 = np.array([-50e3]) QX1 = 1e-4 QX2 = 0 QX3 = 0 QX01 = 1 eps = 1e-6 n = 0During the iteration loop, the linear stiffness matrix is saved from the first iteration. The iteration proceeds until convergence:
while abs((QX1 - QX01) / QX01) > eps: n += 1 K = np.zeros([12, 12]) f = np.zeros([12, 1]) f[3, 0] = 10e3 Ke1 = cfc.beam2ge(ex1, ey1, ep1, QX1) Ke2 = cfc.beam2ge(ex2, ey2, ep1, QX2) Ke3, fe3 = cfc.beam2ge(ex3, ey3, ep3, QX3, eq3) K = cfc.assem(edof[0, :], K, Ke1) K = cfc.assem(edof[1, :], K, Ke2) K, f = cfc.assem(edof[2, :], K, Ke3, f, fe3) if n == 1: K0 = K bc = np.array([1, 2, 3, 10, 11]) a, r = cfc.solveq(K, f, bc) ed = cfc.extract_ed(edof, a) QX01 = QX1 es1 = cfc.beam2gs(ex1, ey1, ep1, ed[0, :], QX1, eq1) es2 = cfc.beam2gs(ex2, ey2, ep1, ed[1, :], QX2, eq2) es3 = cfc.beam2gs(ex3, ey3, ep3, ed[2, :], QX3, eq3) QX1 = es1[1] QX2 = es2[1] QX3 = es3[1] if n > 20: print("The solution does not converge") breakOn the basis of the linear stiffness matrix \(\mathbf{K}_0\) and geometric nonlinear stiffness matrix \(\mathbf{K}_a\) obtained in that computation and stored in
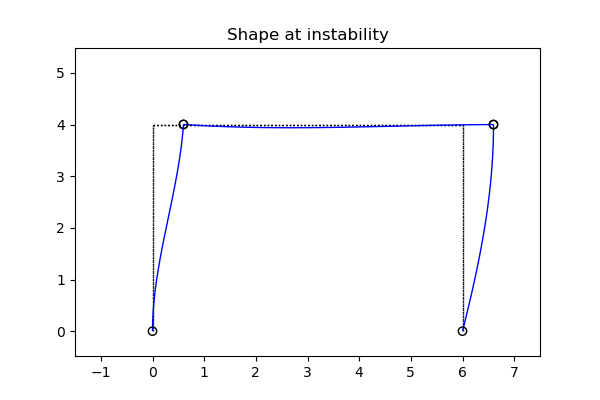
K0andK, the generalised eigen value problem \((\mathbf{K}_a - \lambda \mathbf{K}_0)\phi = 0\) is established. Considering prescribed displacements specified inbc, the generalised eigen value problem is solved usingeigen. Thereafter the loading factors corresponding to the buckling modes are computed as \(\alpha_i = \frac{1}{1 - \lambda_i}\):lam, phi = cfc.eigen(K, K0, bc) one = np.ones(lam.shape) alpha = np.divide(one, one - lam) print(alpha[0])The loading factor corresponding to the first buckling mode is \(\alpha_1 = 6.89\). The shape at instability can be visualized using the first eigenvector:
Ed = cfc.extract_ed(edof, -phi[:, 0]) cfv.figure(1, fig_size=(6, 4)) plotpar = [3, 1, 0] cfv.eldraw2(ex1, ey1, plotpar) cfv.eldraw2(ex2, ey2, plotpar) cfv.eldraw2(ex3, ey3, plotpar) sfac = cfv.scalfact2(ex3, ey3, Ed[2, :], 0.1) plotpar = [1, 2, 1] cfv.eldisp2(ex1, ey1, Ed[0, :], plotpar, sfac) cfv.eldisp2(ex2, ey2, Ed[1, :], plotpar, sfac) cfv.eldisp2(ex3, ey3, Ed[2, :], plotpar, sfac) cfv.plt.axis([-1.5, 7.5, -0.5, 5.5]) cfv.title("Shape at instability") cfv.show_and_wait()